Android动态传感器的介绍及其应用
一、Android 传感器概览
Android 设备都有内置传感器,用来测量运动、屏幕方向和各种环境条件。这些传感器能够提供高度精确的原始数据,用来监测设备的三维移动或定位,或监测设备周围环境的变化。比如 游戏利用重力传感器,已以推断出复杂的用户手势和动作,如倾斜、摇晃、旋转或挥动;天气应用可以温度传感器和湿度传感器来计算和报告露点;旅行应用则可以使用地磁场传感器和加速度计来报告指南针方位。总结来讲,Android平台支持三大类传感器:
- 动态传感器
这类传感器测量三个轴向上的加速力和旋转力。这个类别中包含加速度计、重力传感器、陀螺仪和旋转矢量传感器。
- 环境传感器
这类传感器测量各种环境参数,如环境气温、气压、照度和湿度。这个类别中包含气压计、光度计和温度计。
- 位置传感器
这类传感器测量设备的物理位置。这个类别中包含屏幕方向传感器和磁力计。
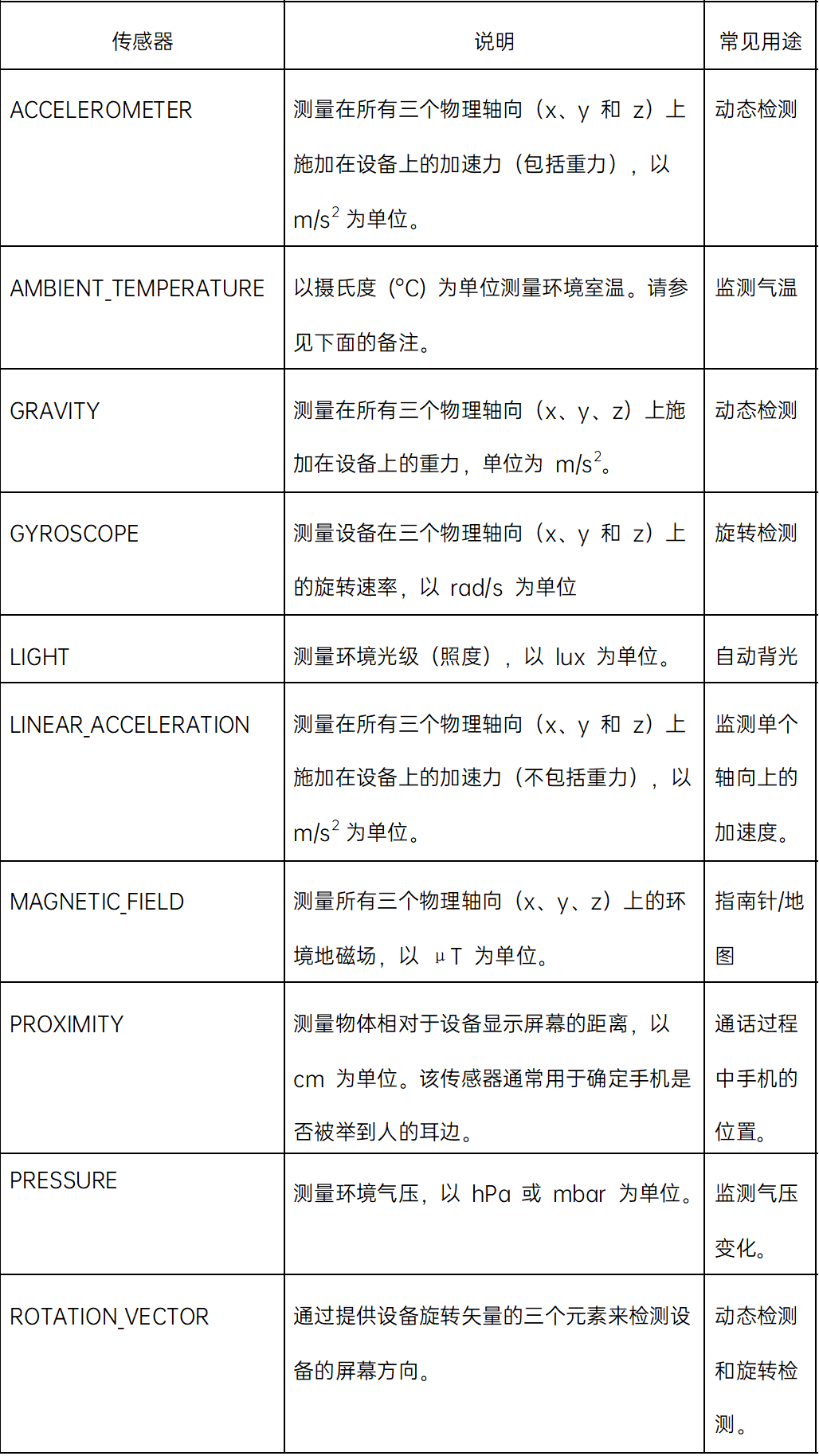
Android 平台支持的常见传感器类型说明如下表:
二、传感器坐标系
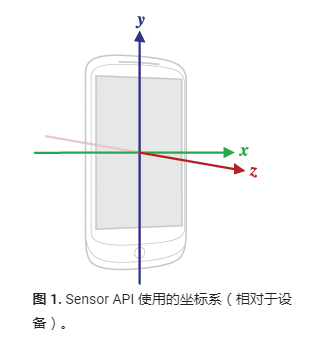
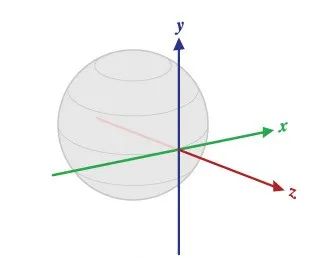
对于大多数传感器,当设备处于默认屏幕方向时,会相对于设备屏幕来定义坐标系(参见图 1)。X 轴为水平向右延伸,Y 轴为垂直向上延伸,Z 轴为垂直于屏幕向外延伸。在此坐标系中,屏幕后面的坐标将具有负 Z 值。以下传感器使用此坐标系:
- 加速度传感器
- 重力传感器
- 陀螺仪
- 线性加速度传感器
- 地磁场传感器
三、动态传感器
本文重点介绍动态传感器。Android 平台上提供多种传感器,可让监视设备的运动,如:基于硬件的加速度计传感器、陀螺仪传感器和基于软件融合的重力传感器、线性加速度传感器、旋转矢量传感器。
运动传感器在监控设备运动方面(例如倾斜、晃动、旋转或摆动)非常有用。该移动通常是用户直接输入的反映(例如,用户在游戏中驾驶汽车,或在游戏中控制球),但也可能反映设备所处的物理环境(例如,在开车时与人一起移动)。在第一种情况下,监控是相对于设备参照系或应用参照系的运动;在第二种情况下,监控是相对于世界参照系的运动。运动传感器本身通常不用于监视设备位置,但可以与其他传感器(例如地磁场传感器)一起使用,以确定设备相对于世界参照系的位置。
1. 加速度计传感器
加速度传感器测量施加到设备的加速度,包括重力,单位是米/秒2。以下代码展示如何获取默认加速传感器的实例:
从概念上讲,加速度传感器通过使用以下关系测量施加到传感器本身的力 (Fs) 来确定施加到设备的加速度 (Ad):
但是,重力始终叠加在加速度计的输出上:
因此,当设备位于桌子上(不加速)时,加速度计的读数为 g = 9.81 m/s2。同样,当设备自由落体并因此以 9.81 m/s2 的速度快速向地面加速时,其加速度计的读数为 g = 0 m/s2。因此,要测量设备的实际加速度,必须从加速度计数据中移除重力的作用。这可以通过应用高通滤波器来实现。相反,您可以使用低通滤波器来隔离重力。以下示例展示如何执行此操作:
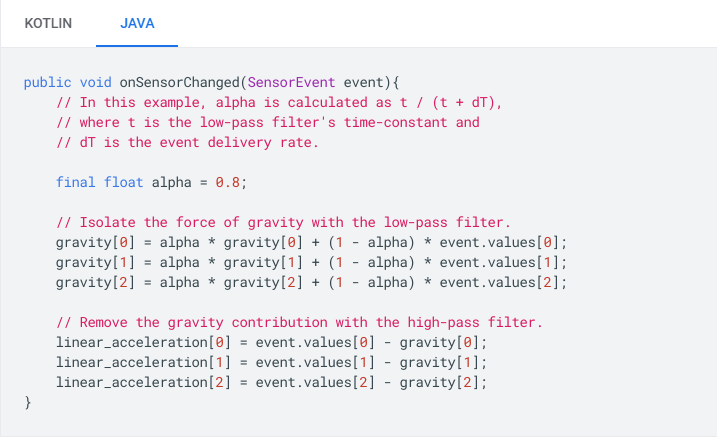
以上代码示例使用简单的过滤器常数 (alpha) 来创建低通滤波器。此过滤器常数来自于一个时间常数 (t),该常数大致表示过滤器添加到传感器事件的延迟时间,以及传感器的事件传输率 (dt)。该代码示例使用 0.8 的 alpha 值进行演示。如果您使用此过滤方法,则可能需要选择其他 alpha 值。但通常来讲,低通滤波器会导致数据滞后,对实时响应的场景会有影响(如旋转屏的应用),通常过滤掉重力的方法是利用陀螺仪进行融合,做kalman 滤波,此文就不展开。
2. 陀螺仪传感器
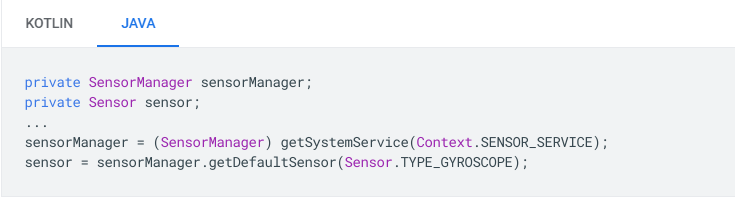
陀螺仪测量围绕设备的 x、y 和 z 轴的旋转速率(弧度/秒)。以下代码展示如何获取默认陀螺仪的实例:
陀螺仪的方法满足右手法则,则如果观察者从 x、y 或 z 轴上某个正位置看向位于原点的设备,则在该设备看起来是逆时针旋转的情况下,该观察者将报告正旋转。标准陀螺仪可提供原始旋转数据,而无需对噪声和漂移(偏差)进行任何过滤或校正。实际上,陀螺仪的噪声和漂移会引入需要补偿的误差。通常,您可以通过监控其他传感器(例如重力传感器或加速度计)来确定漂移(偏差)和噪声。在实际工程中,设备出厂后,也会对陀螺仪进行动态校准,常见的方法是,利用加速度计检测设备是否为静止,若静止时,会扣除陀螺仪的零漂。但这种校准方法存在不及时的局限性,可尝试用加速度计进行姿态融合,进行运动时零漂计算。
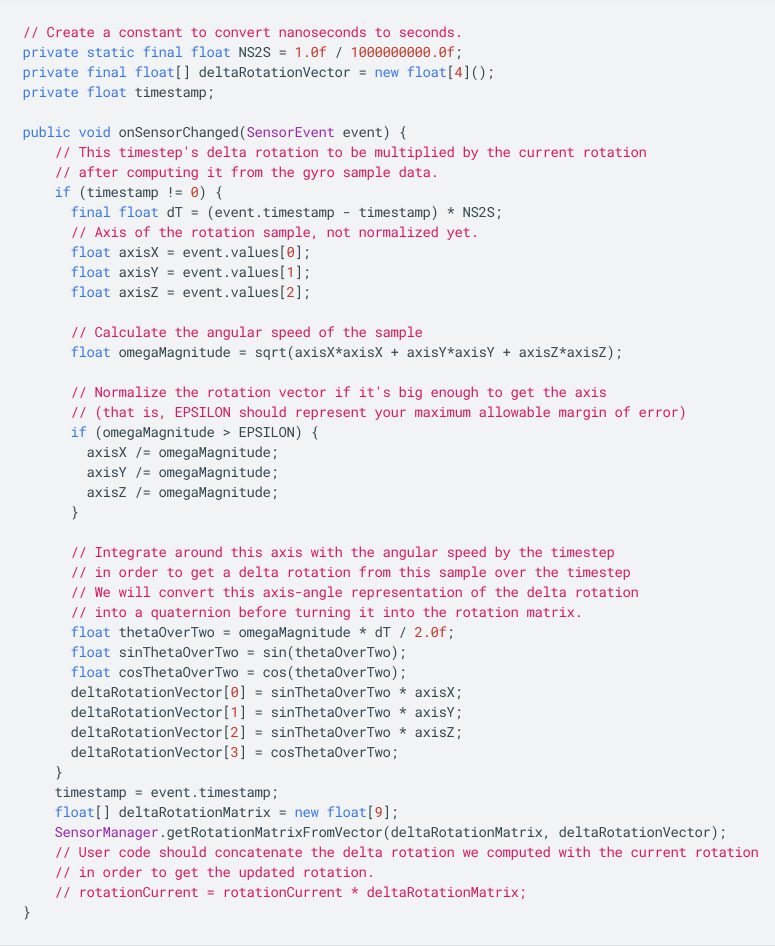
陀螺仪的输出可以随时间积分,计算出设备的角度随时间变化的旋转矢量,如:
3. 重力传感器
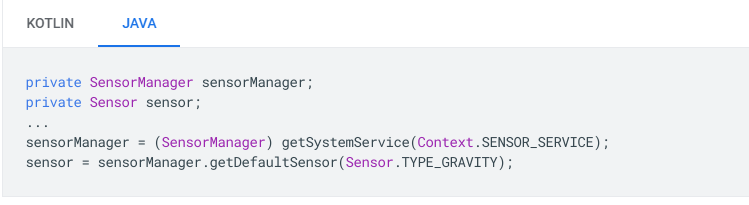
重力传感器通常情况下是软件融合的sensor。提供指示重力方向和大小的三维矢量。通常,此传感器用于确定设备在空间中的相对屏幕方向。以下代码展示如何获取默认重力传感器的实例:
单位与加速度传感器所用的单位 (m/s2) 相同,坐标系与加速传感器使用的坐标系相同。当设备处于静止状态时,重力传感器的输出应与加速度计的输出相同。
4. 线性加速度计传感器
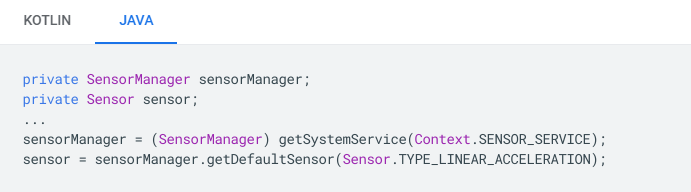
线性加速度计通常情况下是也是软件融合的sensor。线性加速传感器提供了一个三维矢量,表示沿着每个设备轴的加速度(不包括重力)。以下代码展示如何获取默认线性加速传感器的实例:
从概念上讲,此传感器满足以下关系: linear acceleration = acceleration - acceleration due to gravity 当想获取加速度数据而不受重力影响时,通常会使用此传感器。例如,可以使用此传感器查看汽车行驶的速度,可以用来手势检测,还可以用作于惯性导航系统。线性加速度传感器始终具有一个偏移量,需要将其删除。最简单的方法是在应用中构建一个校准步骤。在校准期间,可以要求用户将设备放在桌子上,然后读取所有三个轴的偏移量。然后,您可以从加速传感器的直接读数中减去该偏移量,以获得实际的线性加速度。 传感器坐标系与加速度传感器使用的坐标系相同,计量单位 (m/s2) 也相同。
5. 旋转矢量传感器 旋转矢量将设备的屏幕方向表示为角度和轴的组合,其中设备已围绕轴(x、y 或 z)旋转了 θ 度。该传感器输出的结果是一个单位四元数,也叫做旋转矢量。即 Q = [cos(θ/2), x*sin(θ/2), y*sin(θ/2), z*sin(θ/2)]。旋转矢量的元素没有单位。x、y 和 z 轴的定义方法与加速传感器的定义方法相同。该坐标系具有以下特征:
- X 定义为矢量积 Y x Z。其在设备当前位置与地面相切,并大约指向东。
- Y 在设备当前位置与地面相切,并指向地磁北极。
- Z 指向天空并与地平面垂直。
以下代码展示如何获取默认旋转矢量传感器的实例:
四、总结
旋转矢量传感器和重力传感器是运动检测和监控的最常用传感器。旋转矢量传感器极具通用性,可用于各种与运动有关的任务,例如检测手势,监控角度变化,以及监控相对屏幕方向变化。例如,旋转矢量传感器是开发游戏、增强现实应用(AR)、二维或三维指南针,或者相机稳定应用的理想选择。在大多数情况下,使用这些传感器比使用加速度计和地磁场传感器或方向传感器更好。