gRPC 基础概念详解
gRPC (gRPC Remote Procedure Calls) 是 Google 发起的一个开源远程过程调用系统,该系统基于 HTTP/2 协议传输,本文介绍 gRPC 的基础概念,首先通过关系图直观展示这些基础概念之间关联,介绍异步 gRPC 的 Server 和 Client 的逻辑;然后介绍 RPC 的类型,阅读和抓包分析 gRPC 的通信过程协议,gRPC 上下文;最后分析 grpc.pb.h 文件的内容,包括 Stub 的能力、Service 的种类以及与核心库的关系。
之所以谓之基础,是这些内容基本不涉及 gRPC Core 的内容。
一、基本概念概览
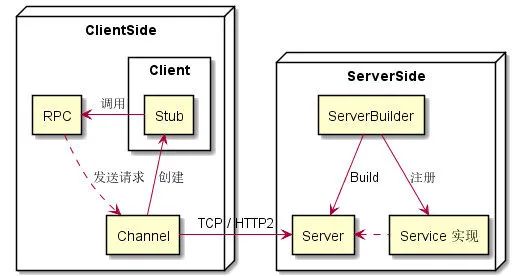
上图中列出了 gRPC 基础概念及其关系图。其中包括:Service(定义)、RPC、API、Client、Stub、Channel、Server、Service(实现)、ServiceBuilder 等。
接下来,以官方提供的 example/helloworld 为例进行说明。
.proto 文件定义了服务Greeter 和 APISayHello:
// helloworld.proto
// The greeting service definition.
service Greeter {
// Sends a greeting
rpc SayHello (HelloRequest) returns (HelloReply) {}
}class GreeterClient 是 Client,是对 Stub 封装;通过 Stub 可以真正的调用 RPC 请求。
class GreeterClient {
public:
GreeterClient(std::shared_ptr<Channel> channel)
: stub_(Greeter::NewStub(channel)) {}
std::string SayHello(const std::string& user) {
...
private:
std::unique_ptr<Greeter::Stub> stub_;
};Channel 提供一个与特定 gRPC server 的主机和端口建立的连接。
Stub 就是在 Channel 的基础上创建而成的。
target_str = "localhost:50051";
auto channel =
grpc::CreateChannel(target_str, grpc::InsecureChannelCredentials());
GreeterClient greeter(channel);
std::string user("world");
std::string reply = greeter.SayHello(user);Server 端需要实现对应的 RPC,所有的 RPC 组成了 Service:
class GreeterServiceImpl final : public Greeter::Service {
Status SayHello(ServerContext* context, const HelloRequest* request,
HelloReply* reply) override {
std::string prefix("Hello ");
reply->set_message(prefix + request->name());
return Status::OK;
}
};Server 的创建需要一个 Builder,添加上监听的地址和端口,注册上该端口上绑定的服务,最后构建出 Server 并启动:
ServerBuilder builder;
builder.AddListeningPort(server_address, grpc::InsecureServerCredentials());
builder.RegisterService(&service);
std::unique_ptr<Server> server(builder.BuildAndStart());RPC 和 API 的区别:RPC (Remote Procedure Call) 是一次远程过程调用的整个动作,而 API (Application Programming Interface) 是不同语言在实现 RPC 中的具体接口。一个 RPC 可能对应多种 API,比如同步的、异步的、回调的。一次 RPC 是对某个 API 的一次调用,比如:
std::unique_ptr<ClientAsyncResponseReader<HelloReply> > rpc(
stub_->PrepareAsyncSayHello(&context, request, &cq));不管是哪种类型 RPC,都是由 Client 发起请求。
二、异步相关概念
不管是 Client 还是 Server,异步 gRPC 都是利用 CompletionQueue API 进行异步操作。基本的流程:
- 绑定一个
CompletionQueue到一个 RPC 调用 - 利用唯一的
void*Tag 进行读写 - 调用
CompletionQueue::Next()等待操作完成,完成后通过唯一的 Tag 来判断对应什么请求/返回进行后续操作
官方文档 Asynchronous-API tutorial 中有上边的介绍,并介绍了异步 client 和 server 的解释,对应这 greeter_async_client.cc 和 greeter_async_server.cc 两个文件。
Client 看文档可以理解,但 Server 的代码复杂,文档和注释中的解释并不是很好理解,接下来会多做一些解释。
1. 异步 Client
greeter_async_client.cc 中是异步 Client 的 Demo,其中只有一次请求,逻辑简单。
-
创建 CompletionQueue
-
创建 RPC (既
ClientAsyncResponseReader<HelloReply>),这里有两种方式: -
stub_->PrepareAsyncSayHello()+rpc->StartCall() -
stub_->AsyncSayHello() -
调用
rpc->Finish()设置请求消息 reply 和唯一的 tag 关联,将请求发送出去 -
使用
cq.Next()等待 Completion Queue 返回响应消息体,通过 tag 关联对应的请求
[TODO] ClientAsyncResponseReader 在 Finish() 完之后就没有用了?
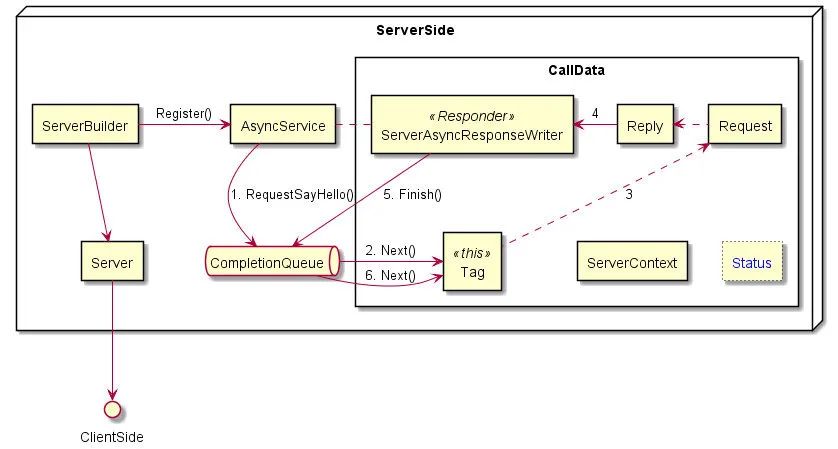
2. 异步 Server
RequestSayHello() 这个函数没有任何的说明。只说是:"we request that the system start processing SayHello requests." 也没有说跟 cq_->Next(&tag, &ok); 的关系。我这里通过加上一些日志打印,来更清晰的展示 Server 的逻辑:
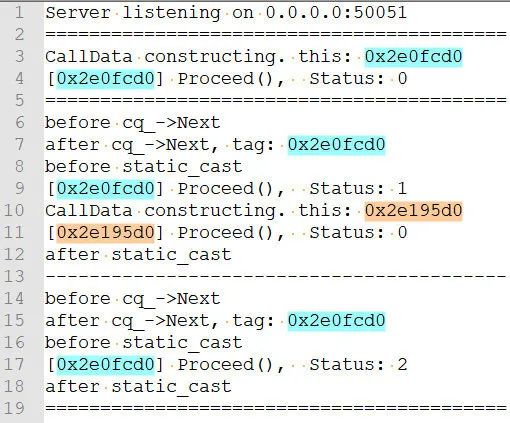
上边绿色的部分为创建的第一个 CallData 对象地址,橙色的为第二个 CallData 的地址。
-
创建一个 CallData,初始构造列表中将状态设置为 CREATE
-
构造函数中,调用 Process()成员函数,调用
service_->RequestSayHello()后,状态变更为 PROCESS: -
传入
ServerContext ctx_ -
传入
HelloRequest request_ -
传入
ServerAsyncResponseWriter<HelloReply> responder_ -
传入
ServerCompletionQueue* cq_ -
将对象自身的地址作为
tag传入 -
该动作,能将事件加入事件循环,可以在 CompletionQueue 中等待
-
收到请求,
cq->Next()的阻塞结束并返回,得到 tag,既上次传入的 CallData 对象地址 -
调用 tag 对应 CallData 对象的
Proceed(),此时状态为 Process -
创建新的 CallData 对象以接收新请求
-
处理消息体并设置
reply_ -
将状态设置为 FINISH
-
调用
responder_.Finish()将返回发送给客户端 -
该动作,能将事件加入到事件循环,可以在 CompletionQueue 中等待
-
发送完毕,
cq->Next()的阻塞结束并返回,得到 tag。现实中,如果发送有异常应当有其他相关的处理 -
调用 tag 对应 CallData 对象的
Proceed(),此时状态为 FINISH,delete this清理自己,一条消息处理完成
3. 关系图
将上边的异步 Client 和异步 Server 的逻辑通过关系图进行展示。右侧 RPC 为创建的对象中的内存容,左侧使用相同颜色的小块进行代替。
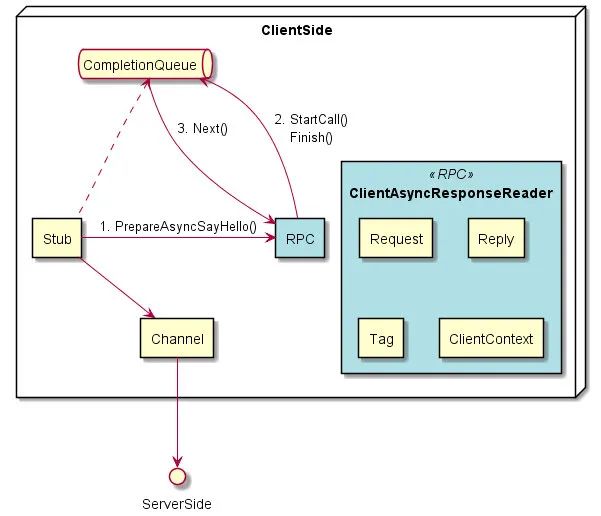
以下 CallData 并非 gRPC 中的概念,而是异步 Server 在实现过程中为了方便进行的封装,其中的 Status 也是在异步调用过程中自定义的、用于转移的状态。
4. 异步 Client 2
在 example/cpp/helloworld 中还有另外一个异步 Client,对应文件名为 greeter_async_client2.cc。这个例子中使用了两个线程去分别进行发送请求和处理返回,一个线程批量发出 100 个 SayHello 的请求,另外一个不断的通过 cq_.Next() 来等待返回。
无论是 Client 还是 Server,在以异步方式进行处理时,都要预先分配好一定的内存/对象,以存储异步的请求或返回。
5. 回调方式的异步调用
在 example/cpp/helloworld 中,还提供了 callback 相关的 Client 和 Server。
使用回调方式简介明了,结构上与同步方式相差不多,但是并发有本质的区别。可以通过文件对比,来查看其中的差异。
cd examples/cpp/helloworld/
vimdiff greeter_callback_client.cc greeter_client.cc
vimdiff greeter_callback_server.cc greeter_server.cc其实,回调方式的异步调用属于实验性质的,不建议直接在生产环境使用,这里也只做简单的介绍:
Notice: This API is EXPERIMENTAL and may be changed or removed at any time.
5.1 回调 Client
发送单个请求,在调用 SayHello 时,除了传入 Request、 Reply 的地址之外,还需要传入一个接收 Status 的回调函数。
例子中只有一个请求,因此在 SayHello 之后,就直接通过 condition_variable 的 wait 函数等待回调结束,然后进行后续处理。这样其实不能进行并发,跟同步请求差别不大。如果要进行大规模的并发,还是需要使用额外的对象进行封装一下。
stub_->async()->SayHello(&context, &request, &reply,
[&mu, &cv, &done, &status](Status s) {
status = std::move(s);
std::lock_guard<std::mutex> lock(mu);
done = true;
cv.notify_one();
});上边函数调用函数声明如下,很明显这是实验性(experimental)的接口:
void Greeter::Stub::experimental_async::SayHello(
::grpc::ClientContext* context, const ::helloworld::HelloRequest* request,
::helloworld::HelloReply* response, std::function<void(::grpc::Status)> f);5.2 回调 Server
与同步 Server 不同的是:
- 服务的实现是继承
Greeter::CallbackService SayHello返回的不是状态,而是ServerUnaryReactor指针- 通过
CallbackServerContext获得reactor - 调用
reactor的Finish函数处理返回状态
三、流相关概念
可以按照 Client 和 Server 一次发送/返回的是单个消息还是多个消息,将 gRPC 分为:
- Unary RPC
- Server streaming RPC
- Client streaming RPC
- Bidirectional streaming RPC
1. Server 对 RPC 的实现
Server 需要实现 proto 中定义的 RPC,每种 RPC 的实现都需要将 ServerContext 作为参数输入。
如果是一元 (Unary) RPC 调用,则像调用普通函数一样。将 Request 和 Reply 的对象地址作为参数传入,函数中将根据 Request 的内容,在 Reply 的地址上写上对应的返回内容。
// rpc GetFeature(Point) returns (Feature) {}
Status GetFeature(ServerContext* context, const Point* point, Feature* feature);如果涉及到流,则会用 Reader 或/和 Writer 作为参数,读取流内容。如 ServerStream 模式下,只有 Server 端产生流,这时对应的 Server 返回内容,需要使用作为参数传入的 ServerWriter。这类似于以 'w' 打开一个文件,持续的往里写内容,直到没有内容可写关闭。
// rpc ListFeatures(Rectangle) returns (stream Feature) {}
Status ListFeatures(ServerContext* context,
const routeguide::Rectangle* rectangle,
ServerWriter<Feature>* writer);另一方面,Client 来的流,Server 需要使用一个 ServerReader 来接收。这类似于打开一个文件,读其中的内容,直到读到 EOF 为止类似。
// rpc RecordRoute(stream Point) returns (RouteSummary) {}
Status RecordRoute(ServerContext* context, ServerReader<Point>* reader,
RouteSummary* summary);如果 Client 和 Server 都使用流,也就是 Bidirectional-Stream 模式下,输入参数除了 ServerContext 之外,只有一个 ServerReaderWriter 指针。通过该指针,既能读 Client 来的流,又能写 Server 产生的流。
例子中,Server 不断地从 stream 中读,读到了就将对应的写过写到 stream 中,直到客户端告知结束;Server 处理完所有数据之后,直接返回状态码即可。
// rpc RouteChat(stream RouteNote) returns (stream RouteNote) {}
Status RouteChat(ServerContext* context,
ServerReaderWriter<RouteNote, RouteNote>* stream);2. Client 对 RPC 的调用
Client 在调用一元 (Unary) RPC 时,像调用普通函数一样,除了传入 ClientContext 之外,将 Request 和 Response 的地址,返回的是 RPC 状态:
// rpc GetFeature(Point) returns (Feature) {}
Status GetFeature(ClientContext* context, const Point& request,
Feature* response);Client 在调用 ServerStream RPC 时,不会得到状态,而是返回一个 ClientReader 的指针:
// rpc ListFeatures(Rectangle) returns (stream Feature) {}
unique_ptr<ClientReader<Feature>> ListFeatures(ClientContext* context,
const Rectangle& request);Reader 通过不断的 Read(),来不断的读取流,结束时 Read() 会返回 false;通过调用 Finish() 来读取返回状态。
调用 ClientStream RPC 时,则会返回一个 ClientWriter 指针:
// rpc RecordRoute(stream Point) returns (RouteSummary) {}
unique_ptr<ClientWriter<Point>> RecordRoute(ClientContext* context,
Route Summary* response);Writer 会不断的调用 Write() 函数将流中的消息发出;发送完成后调用 WriteDone() 来说明发送完毕;调用 Finish() 来等待对端发送状态。
而双向流的 RPC 时,会返回 ClientReaderWriter,:
// rpc RouteChat(stream RouteNote) returns (stream RouteNote) {}
unique_ptr<ClientReaderWriter<RouteNote, RouteNote>> RouteChat(
ClientContext* context);前面说明了 Reader 和 Writer 读取和发送完成的函数调用。因为 RPC 都是 Client 请求而后 Server 响应,双向流也是要 Client 先发送完自己流,才有 Server 才可能结束 RPC。所以对于双向流的结束过程是:
stream->WriteDone()stream->Finish()
示例中创建了单独的一个线程去发送请求流,在主线程中读返回流,实现了一定程度上的并发。
3. 流是会结束的
并不似长连接,建立上之后就一直保持,有消息的时候发送。(是否有通过建立一个流 RPC 建立推送机制?)
- Client 发送流,是通过
Writer->WritesDone()函数结束流 - Server 发送流,是通过结束 RPC 函数并返回状态码的方式来结束流
- 流接受者,都是通过
Reader->Read()返回的 bool 型状态,来判断流是否结束
Server 并没有像 Client 一样调用 WriteDone(),而是在消息之后,将 status code、可选的 status message、可选的 trailing metadata 追加进行发送,这就意味着流结束了。
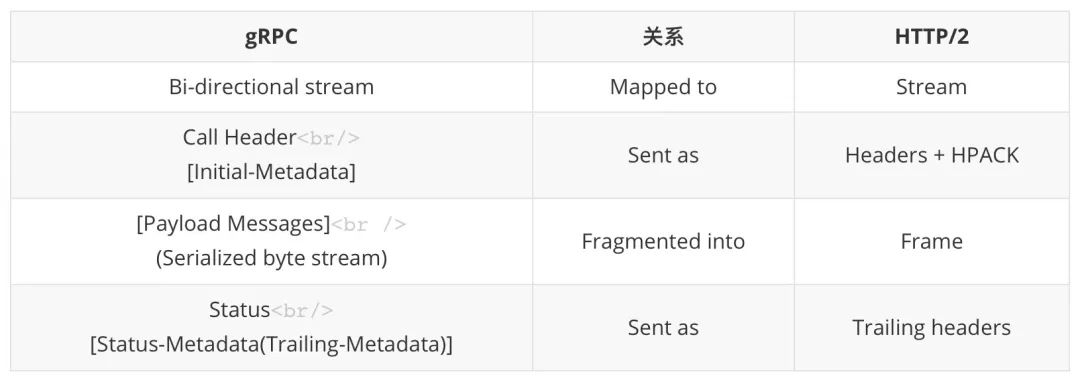
四、通信协议
本节通过介绍 gRPC 协议文档描述和对 helloworld 的抓包,来说明 gRPC 到底是如何传输的。
官方文档《[gRPC over HTTP2] 》中有描述 gRPC 基于 HTTP2 的具体实现,主要介绍的就是协议,也就是 gRPC 的请求和返回是如何基于 HTTP 协议构造的。如果不熟悉 HTTP2 可以阅读一下 [RFC 7540] 。
1. ABNF 语法
ABNF 语法是一种描述协议的标准,gRPC 协议也是使用 ABNF 语法描述,几种常见的运算符在[第三节] 中有介绍:
3. Operators
3.1. Concatenation: Rule1 Rule2
3.2. Alternatives: Rule1 / Rule2
3.3. Incremental Alternatives: Rule1 =/ Rule2
3.4. Value Range Alternatives: %c##-##
3.5. Sequence Group: (Rule1 Rule2)
3.6. Variable Repetition: *Rule
3.7. Specific Repetition: nRule
3.8. Optional Sequence: [RULE]
3.9. Comment: ; Comment
3.10. Operator Precedence2. 请求协议
*<element> 表示 element 会重复多次(最少 0 次)。知道这个就能理解概况里的描述了:
Request → Request-Headers *Length-Prefixed-Message EOS
Request-Headers → Call-Definition *Custom-Metadata这表示 Request 是由 3 部分组成,首先是 Request-Headers,接下来是可能多次出现的 Length-Prefixed-Message,最后以一个 EOS 结尾(EOS 表示 End-Of-Stream)。
2.1 Request-Headers
根据上边的协议描述, Request-Headers 是由一个 Call-Definition 和若干 Custom-Metadata 组成。
[] 表示最多出现一次,比如 Call-Definition 有很多组成部分,其中 Message-Type 等是选填的:
Call-Definition → Method Scheme Path TE [Authority] [Timeout] Content-Type [Message-Type] [Message-Encoding] [Message-Accept-Encoding] [User-Agent]
通过 Wireshark 抓包可以看到请求的 Call-Definition 中共有所有要求的 Header,还有额外可选的,比如 user-agent:
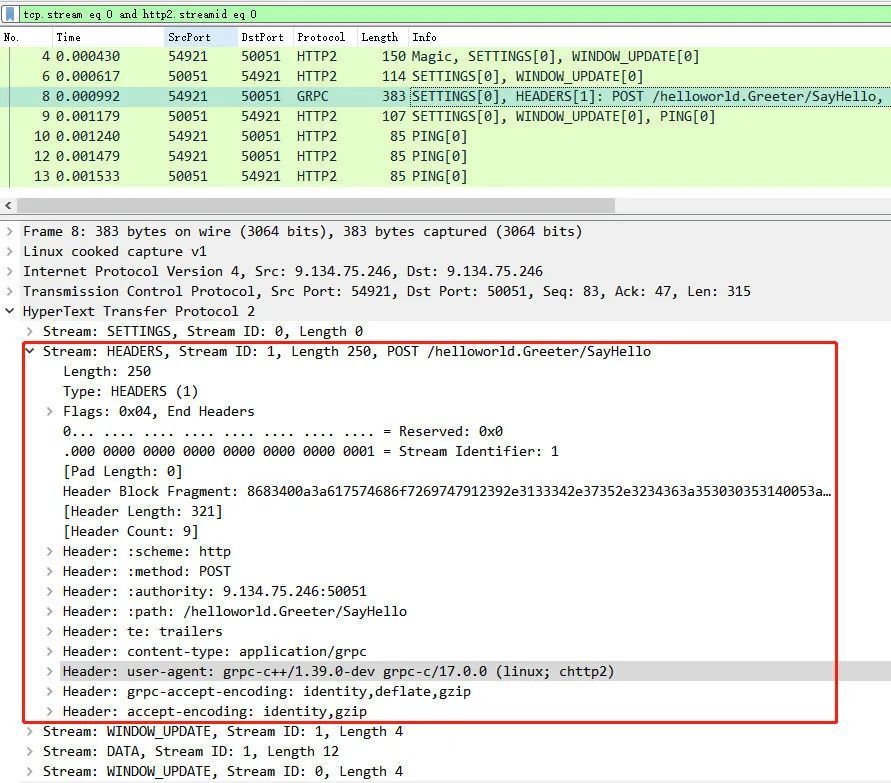
因为 helloworld 的示例比较简单,请求中没有填写自定义的元数据(Custom-Metadata)
2.2 Length-Prefixed-Message
传输的 Length-Prefixed-Message 也分为三部分:
Length-Prefixed-Message → Compressed-Flag Message-Length Message
同样的,Wireshark 抓到的请求中也有这部分信息,并且设置 .proto 文件的搜索路径之后可以自动解析 PB:
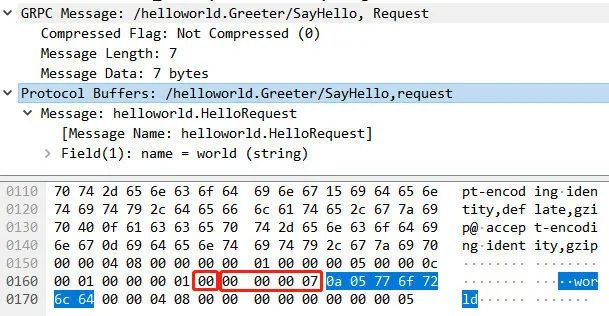
其中第一个红框(Compressed-Flag)表示不进行压缩,第二个红框(Message-Length)表示消息长度为 7,蓝色反选部分则是 Protobuf 序列化的二进制内容,也就是 Message。
在 gRPC 的[核心概念] 介绍时提到,gRPC 默认使用 Protobuf 作为接口定义语言(IDL),也可以使用其他的 IDL 替代 Protobuf:
By default, gRPC uses protocol buffers as the Interface Definition Language (IDL) for describing both the service interface and the structure of the payload messages. It is possible to use other alternatives if desired.
这里 Length-Prefixed-Message 中传输的可以是 PB 也可以是 JSON,须通过 Content-Type 头中描述告知。
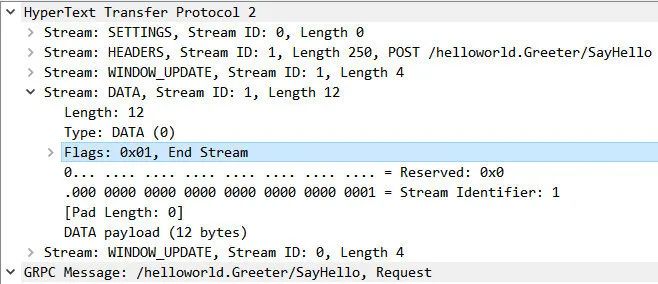
2.3 EOS
End-Of-Stream 并没有单独的数据去描述,而是通过 HTTP2 的数据帧上带一个 END_STREAM 的 flag 来标识的。比如 helloworld 中请求的数据帧,也携带了 END_STREAM 的标签:
3. 返回协议
() 表示括号中的内容作为单个元素对待,/ 表示前后两个元素可选其一。Response 的定义说明,可以有两种返回形式,一种是消息头、消息体、Trailer,另外一种是只带 Trailer:
Response → (Response-Headers *Length-Prefixed-Message Trailers) / Trailers-Only
这里需要区分 gRPC 的 Status 和 HTTP 的 Status 两种状态。
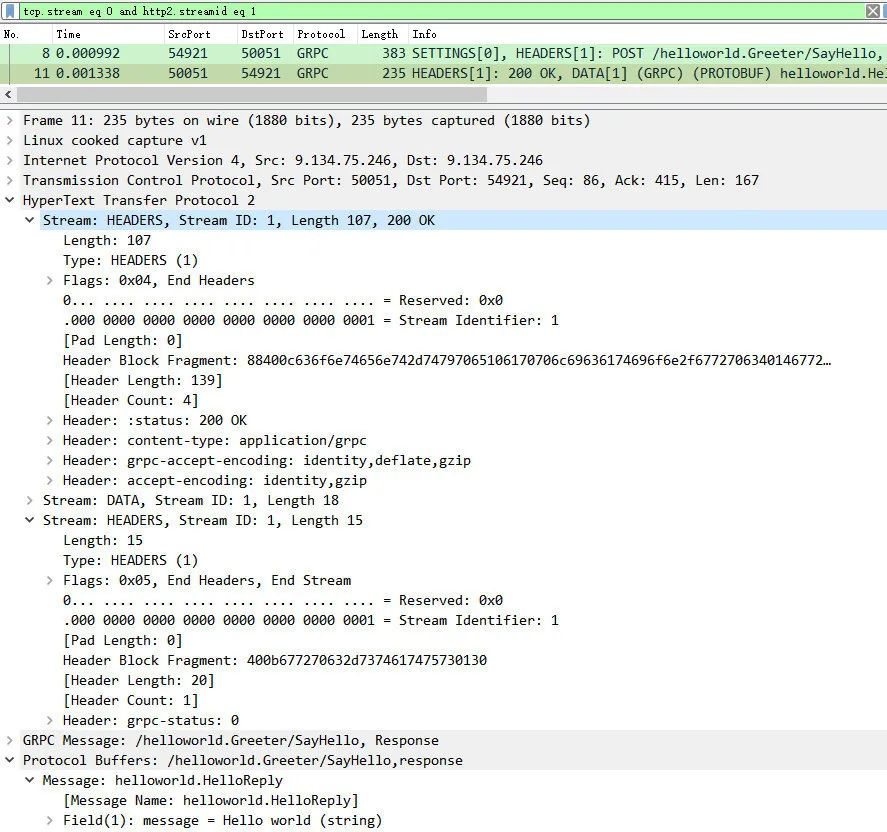
Response-Headers → HTTP-Status [Message-Encoding] [Message-Accept-Encoding] Content-Type *Custom-Metadata
Trailers-Only → HTTP-Status Content-Type Trailers
Trailers → Status [Status-Message] *Custom-Metadata不管是哪种形式,最后一部分都是Trailers,其中包含了 gRPC 的状态码、状态信息和额外的自定义元数据。
同样地,使用 END_STREAM 的 flag 标识最后 Trailer 的结束。
4. 与 HTTP/2 的关系
The libraries in this repository provide a concrete implemnetation of the gRPC protocol, layered over HTTP/2.
五、上下文
gRPC 支持上下文的传递,其主要用途有:
- 添加自定义的 metadata,能够通过 gRPC 调用传递
- 控制调用配置,如压缩、鉴权、超时
- 从对端获取 metadata
- 用于性能测量,比如使用 opencensus 等
客户端添加自定义的 metadata key-value 对没有特别的区分,而服务端添加的,则有 inital 和 trailing 两种 metadata 的区分。这也分别对应这 ClientContext 只有一个添加 Metadata 的函数:
void AddMetadata (const std::string &meta_key, const std::string &meta_value)
而 ServerContext 则有两个:
void AddInitialMetadata (const std::string &key, const std::string &value)
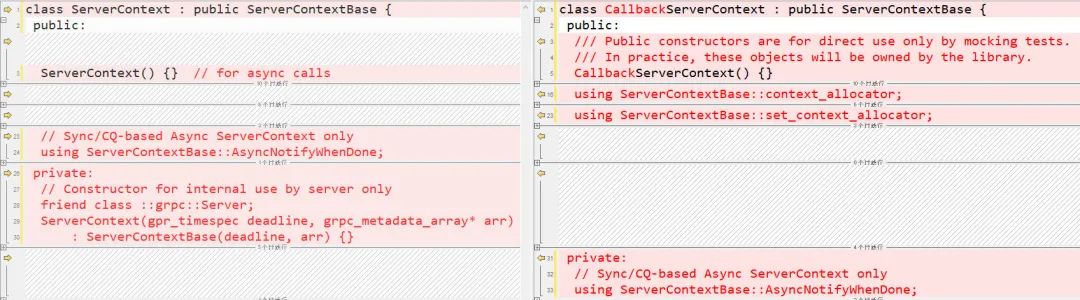
void AddTrailingMetadata (const std::string &key, const std::string &value)还有一种 Callback Server 对应的上下文叫做 CallbackServerContext,它与 ServerContext 继承自同一个基类,功能基本上相同。区别在于:
- ServerContext 被 Sync Server 和基于 CQ 的 Async Server 所使用,后者需要用到
AsyncNotifyWhenDone - CallbackServerContext 因为在
CallOnDone的时候,需要释放 context,因此需要知道 context_allocator,因此对应设置和获取 context_allocator 的两个函数
六、Generated Code
通过 protoc 生成 gRPC 相关的文件,除了用于消息体定义的 xxx.pb.h 和 xxx.pb.cc 文件之外,就是定义 RPC 过程的 xxx.grpc.pb.h 和 xxx.grpc.pb.cc。本节以 helloworld.proto 生成的文件为例,看看 .grpc.pb 相关文件具体定义了些什么。
helloworld.grpc.pb.h 文件中有命名空间 helloworld,其中就仅包含一个类 Greeter,所有的 RPC 相关定义都在 Greeter 当中,这其中又主要分为两部分:
- Client 用于调用 RPC 的媒介
Stub相关类 - Server 端用于实现不同服务的 Service 相关类和类模板
1. Stub
.proto 中的一个 service 只有一个 Stub,该类中会提供对应每个 RPC 所有的同步、异步、回调等方式的函数都包含在该类中,而该类继承自接口类 StubInterface。
为什么需要一个 StubInterface 来让 Stub 继承,而不是直接产生 Stub?别的复杂的 proto 会有多个 Stub 继承同一个 StubInterface 的情况?不会,因为每个 RPC 对应的函数名是不同。
Greeter 中唯一一个函数是用于创建 Stub 的静态函数 NewStub:
static std::unique_ptr<Stub> NewStub(...)
Stub 中同步、异步方式的函数是直接作为 Stub 的成员函数提供,比如针对一元调用:
- SayHello
- AsyncSayHello
- PrepareAsyncSayHello
[TODO] 为什么同步函数SayHello的实现是放在源代码中,而异步函数AsyncSayHello的实现是放在头文件中(两者都是直接 return 的)?
return ::grpc::internal::BlockingUnaryCall< ::helloworld::HelloRequest, ::helloworld::HelloReply, ::grpc::protobuf::MessageLite, ::grpc::protobuf::MessageLite>(channel_.get(), rpcmethod_SayHello_, context, request, response);
return std::unique_ptr< ::grpc::ClientAsyncResponseReader< ::helloworld::HelloReply>>(AsyncSayHelloRaw(context, request, cq));
回调方式的 RPC 调用是通过一个 experimental_async 的类进行了封装(有个 async_stub_ 的成员变量),所以回调 Client 中提到,回调的调用方式用法是 stub_->async()->SayHello(...)。
experimental_async 类定义中将 Stub 类作为自己的友元,自己的成员可以被 Stub 直接访问,而在 StubInterface 中也对应有一个 experimental_async_interface 的接口类,规定了要实现哪些接口。
2. Service
有几个概念都叫 Service:proto 文件中 RPC 的集合、proto 文件中 service 产生源文件中的 Greeter::Service 类、gRPC 框架中的 ::grpc::Service 类。本小节说的 Service 就是 helloworld.grpc.pb.h 中的 Greeter::Service。
2.1 Service 是如何定义的
helloworld.grpc.pb.h 文件中共定义了 7 种 Service,拿出最常用的 Service 和 AsyncService 两个定义来说明下 Service 的定义过程:通过类模板链式继承。
Service 跟其他几种 Service 不同,直接继承自 grpc::Service,而其他的 Service 都是由类模板构造出来的,而且使用类模板进行嵌套,最基础的类就是这里的 Service。
Service 有以下特点:
- 构造函数利用其父类
grpc::Service的AddMethod()函数,将.proto文件中定义的 RPC API,添加到成员变量methods_中(methods_是个向量) AddMethod()时会创建RpcServiceMethod对象,而该对象有一个属性叫做api_type_,构造时默认填的ApiType::SYNCSayHello函数不直接声明为纯虚函数,而是以返回UNIMPLEMENTED状态,因为这个类可能被多次、多级继承
所以 Service 类中的所有 RPC API 都是同步的。
再看 AsyncService 的具体定义:
template <class BaseClass>
class WithAsyncMethod_SayHello : public BaseClass { ... };
typedef WithAsyncMethod_SayHello<Service > AsyncService;所以 AsyncService 的含义就是继承自 Service,加上了 WithAsyncMethod_SayHello 的新功能:
- 构造时,将 SayHello (RPC) 对应的
api_type_设置为ApiType::ASYNC - 将
SayHello函数直接禁用掉,abort()+ 返回UNIMPLEMENTED状态码 - 添加
RequestSayHello()函数, 异步 Server 小节中有介绍过这个函数用法
通过 gRPC 提供的 route_guide.proto 例子能更明显的理解这点:
typedef WithAsyncMethod_GetFeature< \
WithAsyncMethod_ListFeatures< \
WithAsyncMethod_RecordRoute< \
WithAsyncMethod_RouteChat<Service> > > >
AsyncService;这里 RouteGuide 服务中有 4 个 RPC,GetFeature、ListFeatures、RecordRoute、RouteChat,通过 4 个WithAsyncMethod_{RPC_name} 的类模板嵌套,能将 4 个 API 都设置成 ApiType::ASYNC、添加上对应的 RequestXXX() 函数、禁用同步函数。
[TODO] 通过类模板嵌套继承的方式,有什么好处? 为什么不直接实现 AsyncService 这个类呢?
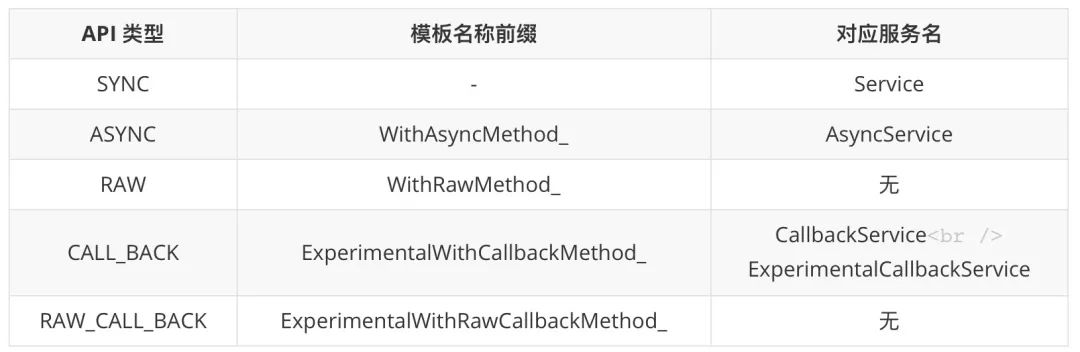
2.2 Service 的种类
helloworld.grpc.pb.h 文件中 7 种 Service 中,有 3 对 Service 的真正含义都相同(出于什么目的使用不同的名称?),实际只剩下 4 种 Service。前三种在前边的同步、异步、回调 Server 的介绍中都有涉及。
- Service
- AsyncService
- CallbackService
- ExperimentalCallbackService -- 等价于 CallbackService
- StreamedUnaryService
- SplitStreamedService -- 等价于 Service
- StreamedService -- 等价于 StreamedUnaryService
其实这些不同类型的 Service 是跟前边提到的 api_type_ 有关。使用不同的 ::grpc::Service::MarkMethodXXX 设置不同的 ApiType 会产生不同的 API 模板类,所有 API 模板类级联起来,就得到了不同的 Service。这三者的关系简单列举如下:
另外还有两种模板是通过设置其他属性产生的,这里暂时不做介绍:

[TODO] 头文件中没有用到的类模板在什么场景中会用到?
3. 与 ::grpc 核心库的关系
Stub 类中主要是用到 gRPC Channel 和不同类型 RPC 对应的方法实现:

Service 类则继承自 ::grpc::Service,具备其父类的能力,需要自己实现一些 RPC 方法具体的处理逻辑。其它 Service 涉及到 gRPC 核心库的联系有:
AsyncService::RequestSayHello()调用::grpc::Service::RequestAsyncUnary。CallbackService::SayHello()函数返回的是::grpc::ServerUnaryReactor指针。CallbackService::SetMessageAllocatorFor_SayHello()函数中调用::grpc::internal::CallbackUnaryHandler::SetMessageAllocator()函数设置 RPC 方法的回调的消息分配器。
[TODO] SetMessageAllocatorFor_SayHello() 函数并没有被调用到,默认该分配器指针初始值为空,表示用户预先自己分配好而无需回调时分配?