深入理解完美哈希
本文对完美 Hash 的概念进行了梳理,通过 Hash 构建步骤来了解它是如何解决 Hash 冲突的,并比较了 Hash 表和完美 Hash 表。下面介绍常见的 Hash 与 Perfect Hash 函数及它们在不同场景的应用。
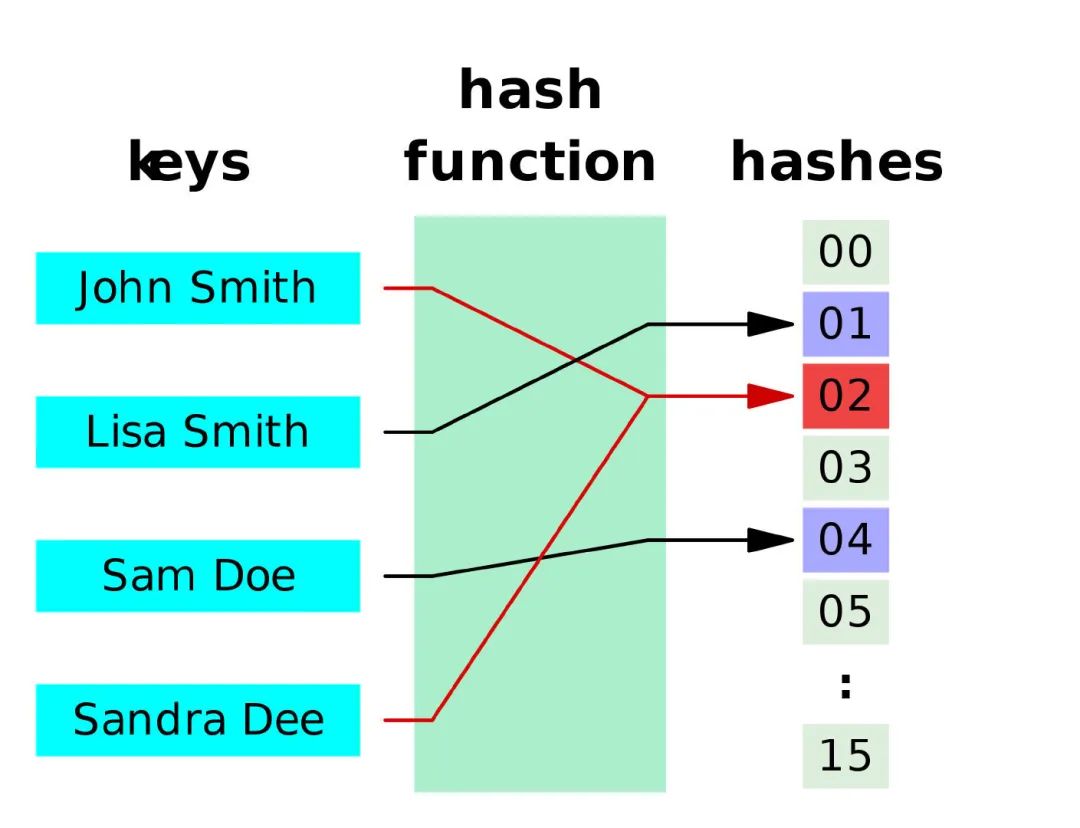
散列函数(英语:Hash function)又称散列算法、哈希函数,是一种从任何一种数据中创建小的数字“指纹”的方法。散列函数把消息或数据压缩成摘要,使得数据量变小,将数据的格式固定下来。该函数将数据打乱混合,重新创建一个叫做散列值(hash values,hash codes,hash sums,或 hashes)的指纹。散列值通常用一个短的随机字母和数字组成的字符串来代表。
Hash 函数是一种将集合 S 转换成具有固定长度的、不可逆的的集合 U 的单射,它的值一般为数字合字母的组合,Hash 函数拥有无限的输入空间,却只有有限的输出空间,这意味着 Hash 函数一定会产生碰撞,一个好的 Hash 函数可以显著的降低碰撞概率。Hash 函数一般有一下特征:
- 一致性。Hash 函数可以接受任意大小的数据,并输出固定长度的散列值,同时输出不同值的概率应该尽可能一致。如 CityHash128,不管原始数据有多大,计算得到的 hash 值总是 128 bit。
- 雪崩效应。原始数据哪怕只有一个字节的修改,得到的 hash 值都会发生巨大的变化。
- 单向。只能从原始数据计算得到 hash 值,不能从 hash 值计算得到原始数据。所以散列算法不是加密解密算法,加密解密是可逆的,散列算法是不可逆的。
- 避免冲突。几乎不可能找到一个数据和当前计算的这个数据计算出一样的 hash 值,因此散列函数能够确保数据的唯一性。在 Hash 函数保证不同值出现的概率一致的情况下,CityHash128 出现碰撞的概率只有 2 ^ -128。因为不同 Key 的碰撞概率很小,所以在某些情况下我们可以直接使用较短的 Hash 值代替较长原始数据存储。
Hash 函数
常见的 Hash 函数有:
- CRC32:CRC32 能够快速的生成 32 位 Hash 值,一般在数据库系统或数据传输中出现,用于快速校验数据是否完整;
- [SipHash] :SipHash 并不是为了速度设计的,与其他 Hash 函数相比速度上不占优势,而提供了 [HashDoS] 保护,是 Rust 中的 Hash 函数的默认实现,最新 Redis 中也在使用 SipHash;
- MurMurHash:经典快速的 Hash 函数,目前最新的版本是 MurMurHash3,可以生成 32 位或者 128 位 Hash 值;
- [CityHash] :来自于 Google 实现,受到 MurmurHash 启发,但是比 MurmurHash 更快,可以输出 64 位、128 位或者 256 位 Hash 值。ClickHouse 内置;
- [xxHash] :针对小数据集速度非常快,支持输出 32 位、64 位、128 位 Hash 值,Github 开源,SSE 支持。ClickHouse 内置。
xxHash 的 benchmark,统计了常用 Hash 函数的性能:

Hash 表:通过 Hash 算法将 Key 均匀映射到不同的位置上,访问单个 key 时可以达到 O(1) 的平均时间复杂度,加快访问速度。
安全 Hash 函数
安全 Hash 函数(或者叫加密 Hash 函数)是一种优秀的 Hash 函数,无法(或者很难)通过 Hash 值猜测出 Key,更精确的说,安全 Hash 必须满足抗碰撞和不可逆两个条件:无法通过 Hash 值的统计学方法逆向,以及无法通过算法层逆向。常见的安全 Hash 算法包括:
- SHA2,SHA3 系列
- BLAKE 系列
SHA0、SHA1、MD5 算法已经被认为是不安全的,存在已知的漏洞,不要使用这些不安全的 Hash 函数来签名。
常见用法:
安全 Hash 函数广泛应用于数字签名技术中:对原文进行 Hash 后,将 Hash 结果通过私钥签名,避免原文被泄露或者被修改;工作量证明:如加密货币中挖矿就是通过给定值,计算符合条件的 Hash 输入;文件 ID:在网站下载地址旁往往提供了文件的 MD5 或者 SHA-1,确保下载的文件完整且没有被调包。
HashDoS 与全域 Hash(universal hash)
全域 Hash 解决的是确定性 Hash 算法无法应对特殊输入的问题。在链式 HashMap 里,假设 m = bucket size,考虑我们有输入集合 S 和 Hash 函数 H,其中 H = H’ % m,攻击者在知道 Hash 函数的情况下,容易构造集合 S 使得集合中每一个元素的 Hash 值相同,那 HashMap 会退化成链表。最坏情况下,HashMap 查找的时间复杂度变成了 O(n),插入 n 个元素时需要 O(n2) 的时间复杂度,所以也叫 HashDoS 攻击。
全域 Hash 解决的问题是:对于精心构造的输入,冲突率仍然在 1 / m。一个简单的想法是随机选一个 Hash 函数,不是在每一次操作时选一个,而是在输入前选一个 Hash 函数,之后所有的操作都基于该 Hash 函数。
当然 H 也不是随便定义的,具体来说是在 |H| 个 Hash 函数 H 中随机的选择一个 Hash 函数作为所有 key 的 Hash 函数,H 中所有的 Hash 函数 H’ 对于不相等的关键词 x 和 y,使得 H’(x) 和 H’(y) 值相等的函数 H’ 的数量个数等于 |H| / m,[此时冲突概率为 1/m。]
完美 Hash 函数
传统的 Hashmap 总会有分支预测开销与内存对比,最差时间复杂度是 O(n),有那么一种 Hash 函数:完美 Hash 函数( Perfect Hash Function,PHF),它可以在最坏情况下取得 O(1) 的时间复杂度。当然鱼和熊掌不可兼得,完美 Hash 要求有一个静态的输入集合,查找的 Key 必须存在于静态输入集合中,导致使用场景受限。它有几个特点:
- 完美 Hash 大部分都要求输入 Key 的集合是已知的,用于提前构建数据结构;
- 构造算法复杂,大部分情况下需要比较大的内存,特别是时间复杂度高,需要很长的时间建立索引,构建海量 key 的完美 Hash 可能会失败;
- 完美 Hash 在实现上并不是只有一个 Hash 函数,而是多个普通 Hash 函数与数据结构算法上的组合,这意味着需要额外空间存储 Hash 冲突信息。
尽管它有一些缺点,但是在一些场景如汉字拼音映射,词典,以及程序中预定义的映射关系都有它的应用。
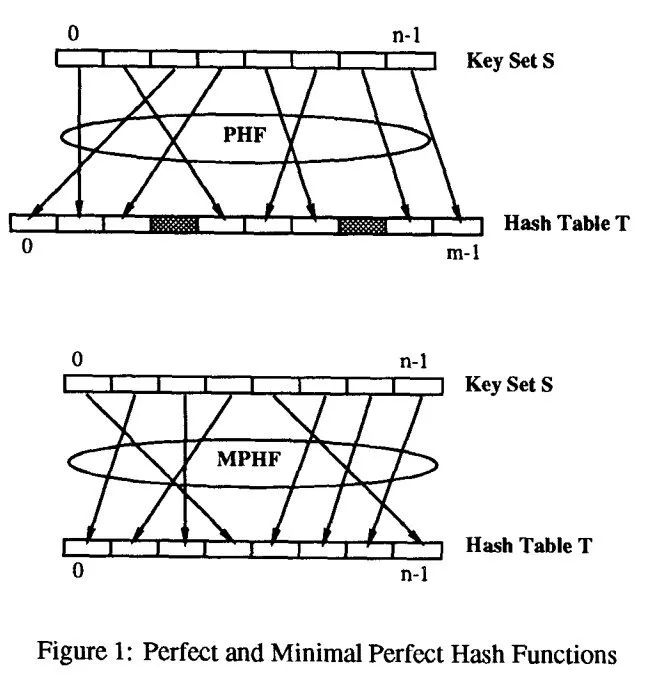
Perfect Hash Function 对于给定的集合 S,可以将 S 中所有的 Key 映射到整数 [0, m) 中,其中 m >= |S|。当 m = |S| 时,称为最小完美 Hash 函数(Minimal Perfect Hash Function, MPHF)。即作为一个特例,如果完美 Hash 可以将 N 个 key 映射到 0 到 N-1 的整数,那它可以被称为最小完美 Hash 函数。
更进一步,如果 Hash 后给出 key 的顺序没有发生变化,称为完美 Hash 函数是保序的。如果一个 Hash 函数在给定区域不超过 t 次冲突,那这个 Hash 函数称为 t-完美 Hash 函数。
- [cmph] :C/C++,集合了大部分知名完美 Hash 算法的库,针对不同的数据集合有推荐不同的算法,参数可调,文档不多,LGPL 协议
- [gperf] :C/C++,专门针对于小数据集完美 Hash 的生成库,GPL 协议;
- [rust-phf] :使用 CHD 算法生成完美 Hash,使用简单,10 w 个 key 只需 0.4s 就能生成。
下文会讨论 FCH,CHD,PTHASH 是如何巧妙解决了 Hash 冲突并实现了最差 O(1) 时间复杂度的。
完美 Hash 首先需要离线构造得到 Hash 冲突的信息离线保存下来,需要查询时,利用先前生成的信息计算得到唯一的整数 Hash value。
在描述算法之前,先假设:
对于已知大小 n = |S| 的输入集合 S,已知的负载因子 alpha 和参数 c,table 的数量 table_size = n * alpha,桶的数量 m = cn / (log2 n + 1)。一般来说,c 在 2-8 左右,确保每个桶有合适数量的 key,同时不会空出太多的桶。最终所有的 key 会映射到 [0, table_size) 中的 整数。当 alpha = 1,table_size = n,为 MPHF。
FCH
[A Faster Algorithm for Constructing Minimal Perfect Hash Functions] 由 Fox, Chen, Heath 发明的一种生成完美 Hash 的算法,FCH 是一个相当经典的 Perfect Hash 的实现,后续多种算法均受到 FCH 算法的启发。
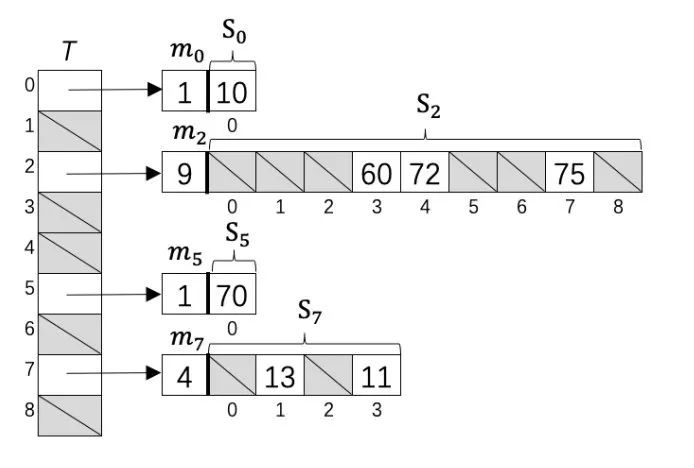
FCH 是一种基于二级 Hash 表的完美 Hash 函数:
将数据通过一级 Hash 映射到 T 空间中,然后冲突的数据随机选取新的哈希函数映射到 S 空间中,且 S 空间的大小 m 是冲突数据的平方(例如 T2 中有三个数字产生冲突,则映射到 m 为 9 的 S2 空间中,m 即为避免桶内 Hash 冲突的参数),此时可以容易找到避免碰撞的哈希函数(这个避免冲突的过程称为 position 或者 displace)。最差情况下所需存储空间为 O(n2),但只要适当选择哈希函数减少一级哈希时的碰撞,则可以使预期存储空间为 O(n)。
1 . Mapping
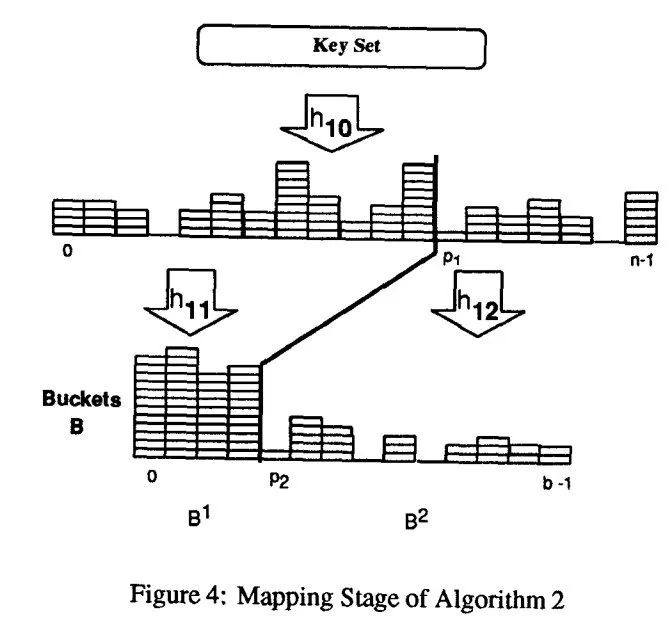
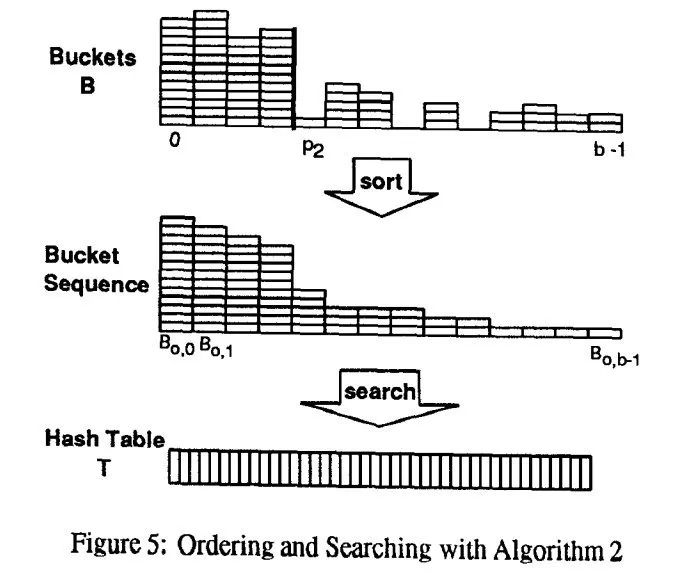
Mapping 阶段为了将 60% 的 key 分布到 30 % 的桶里,将 n 个 key 分为 S1 和 S2 两个集合,其中 S1 称为 dense set,key 的数量大概保持在 0.6 * n,S2 为 sparse set,key 的数量大概在 0.4 * n 左右。同时,把所有桶分为两个部分 B1 和 B2,B1 数量 p2 = 0.3 * m,称为 dense buckets,B2 数量 0.7 * m,称为 sparse bucket。使用普通的 Hash 函数如 Cityhash/MurmurHash,将 S1 通过 H1 映射到 B1 中,同样道理将 S2 通过 H2 映射到 B2 中。
用数学语言描述:

Ordering 阶段将所有的桶按照桶内冲突的数量排序,冲突数量最多的桶放在最前面。
3 . Searching
Searching 阶段会依次处理每个桶里的冲突,尝试将不重复的 Hash 值分配给每一个 key。经过了上一个阶段排序,该阶段会优先处理冲突最多的桶。对于每一个桶,尝试参数 di, bi,给桶内每一个 key 分配 Hash 值 position(x, di, bi) = (h(x, s2 + b1) + di) mod table_size,这个值在 [0, table_size) 之间,其中 s2 是全局随机种子,bi 是单个 bit,di 是一个从 0 开始的递增的整数,如果 Hash 值在桶内和之前计算过的 Hash 值冲突,则改变 bi 或者 di 直到 Hash 值不发生冲突(为了加速 di 的寻找,原始论文中提出了辅助数据结构和压缩方法,感兴趣可以参考论文)。
m * ((log2 n) + 1) = cn bit (这只是理论上的结果,如何存储 bi 和 di 不在我们讨论范围内),即每一个 key 只占用了 c 个 bit。
查询时:对于给定的 key,计算一级 Hash,得到桶编号,通过该桶的 bi,di 和全局 s2 参数来计算二级哈希,即完成了一次查找,可以发现,任何 key 的查询步骤都时相同的,没有循环,即所有步骤都是确定的 O(1)。注意到这里无法判断 key 是否存在。
CHD
为了解决 FCH 构建过慢的问题,出现了基于 FCH 思想的 CHD,一种实现简单的 Perfect Hash 算法,支持 MPHF,空间利用率更高,但 lookup 更慢。
主要不同地方:使用通用 Hash 函数计算出为每一个 key 计算出三个 Hash 值:h, h0, h1,h 用来表示桶号,h0、h1 用来计算最终的 position,position 定义为 position = (h0 + (h1 * d1) + d0) mod table_size。
与 FCH 相同,CHD 一共分为三个阶段:
1 . Mapping
Mapping 阶段不需要像 FCH 拆分两个集合,而是直接映射到一个集合中。
使用 c++ 来描述:
for (auto key : keys) {
auto [h, h0, h1] = hash(key);
buckets[h].hash = h;
buckets[h].keys.push_back(make_tuple(h0, h1));
}2 . Ordering
与 FCH 相同。
sort(buckets.begin(), buckets.end(), [](auto &lhs, auto &rhs){
return lhs.keys.size() > rhs.keys.size();
});3 . Searching (也叫 displace)
Searching 阶段同样是处理每个桶里的冲突,不同的是 position 函数发生了变化:为每一个桶初始化一个 pilot,其中 pilot = d0 * table_size + d1,使用 position 公式计算 key 的 Hash 值,发生冲突时,pilot 加上一(相当与 d1 加上 1,此时 position 的结果会发生较大的变化)重新计算 position 直到桶里所有 key 都不发生冲突。
bool_vector position_used, position_used_in_bucket;
vector<uint32> p; // 结果数组
position_used.resize(table_size);
position_used_in_bucket.resize(buckets[0].keys.size());
p.resize(m);
for (auto &bucket : buckets) {
if (bucket.keys.size() == 0) continue;
// 单个桶 pilot = d0 * table_size + d1
int d0 = 0;
int d1 = 0;
while(true) {
bool ok = true;
position_used_in_bucket.clear();
for (auto [h0, h1] : bucket.keys) {
uint64 position = (h0 + (h1 * d1) + d0) % table_size;
if (position_used[position]) {
// hash 结果冲突,换一个 pilot
ok = false;
break;
}
if (position_used_in_bucket[position]) {
// 桶内 hash 结果冲突,换一个 pilot
ok = false;
break;
}
position_used_in_bucket[position] = true;
}
if (ok) {
// 单个桶处理完毕
position_used.union(position_used_in_bucket);
// pilot 存到 p 数组中
p[bucket.h] = d0 * table_size + d1;
break;
}
d1++;
if (d1 >= table_size) {
d1 = 0;
d0++;
if (d0 > table_size) {
// 构建失败,找不到一个可用的 pilot
throw ...
}
}
}
}
最终得到的 m 个 pilot 存入 P 数组中。
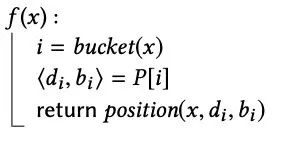
查询时:对于给定的 key,使用固定出的 Hash 函数计算出 h, h0, h1,根据 P[h] 得到 pilot 与 d0, d1,使用 poisition 易求得 Hash 值,即完成了一次查找(至少 4 次除法 or 求余操作,h < m)
auto [h, h0, h1] = hash(key);
auto pilot = p[h];
auto d0 = pilot / table_size;
auto d1 = pilot % table_size;
return (h0 + (h1 * d1) + d0) % table_size;结果集 P 中,pilot 往往很小,有压缩空间,在作者的论文中,为了压缩 P 数组的大小,采用 [FN Encoding] 压缩,实现起来更简单。
compact 压缩:给定一系列整数 S,已知 S 中最大的整数 x 需要使用 y 个 bit 表示,我们可以将所有的整数都通过固定 y bit 来表示而不牺牲精度和访问时间。
CHD 算法比较简单,Github 上也有不同语言的实现,[ rust 语言的实现] 。
PTHash
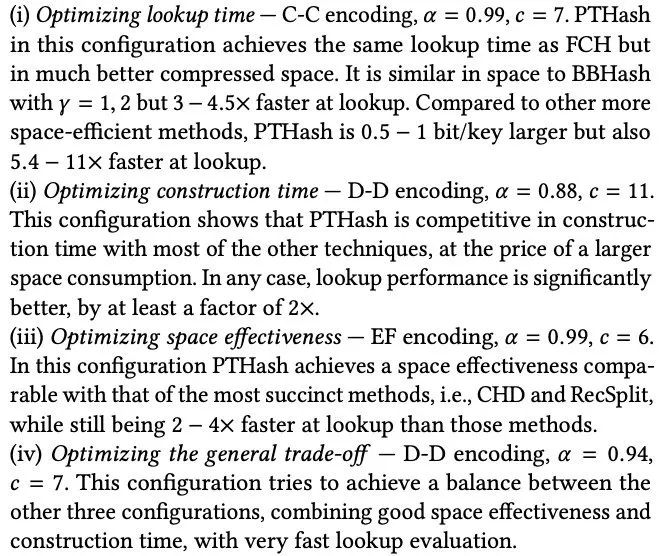
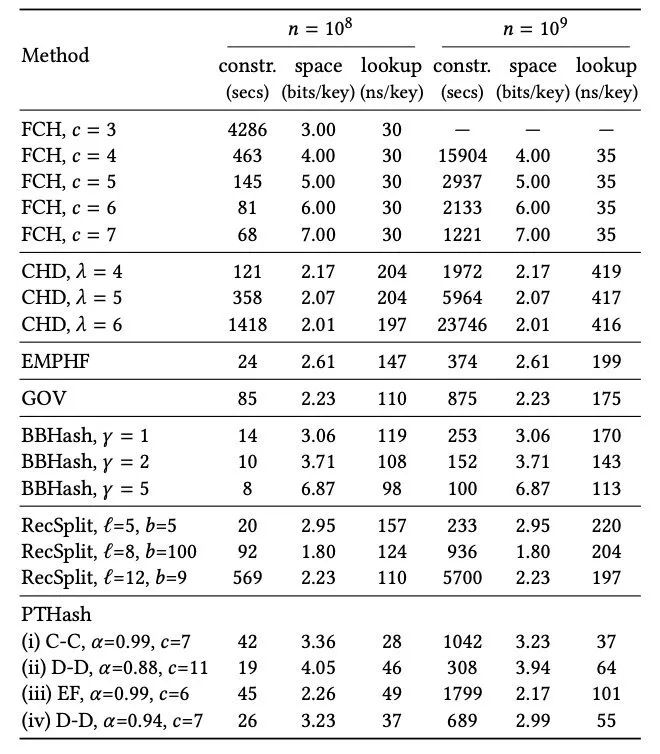
虽然 CHD 实现简单,但其中包含了大量除法求余计算,Encoding 后效率并不高,lookup 耗时过久。最近有一篇文章提出了 [PTHash] 方法,在 FCH 上改进了构建时间,并提高了空间利用率,作者还提供了源代码供参考。
设计思路和 FCH 相似,只不过 position 定义变成了 position(x, pilot) = (h(x, s) xor h(pilot, s)) mod table_size,其中 h 是普通 Hash 函数,x 是 key,s 是全局种子。与 FCH 相比可以提前计算所有 key 的 Hash h(x, s),节约构造时间 。使用 compact 压缩方式效果很好,lookup 耗时也能达到 FCH 水平。
1 . Mapping
与 FCH 相同
2 . Ordering
与 FCH 相同
3 . Searching
使用新的公式计算 position,得到 n 个 pilot,由 position 公式定义,可以发现大部分 pilot 都是比较小的值,作者还介绍了一种 Front-Back Encoding,将结果集前 30% 拆分成 front 集,后 (1- 30%) 拆分为 back 集,代价是运行时多一次分支判断。
由于 front 集合里的桶是最先处理冲突的,冲突发生次数低,大部分 pilot 都比 back 集合内的要小,压缩率更高。将 Front 和 Back 集合里的 pilot 通过 Compact 编码后,称为 Compact-Compact Encoding。
查询时,按照 bucket id 确定去 front 还是 back 集合查询 pilot,不考虑解压过程,只需要两次除法 or 求余操作。
当然这里也可以牺牲部分空间,不做 Front-Back Encoding 以取得更快的查询速度,根据不同的 Encoding 方式,可以在时间&空间上取得平衡:
HashMap
HashMap 本质上是根据给定的 key 获得 value 的地址。设计核心主要在于:
- HashMap 的空间开销:key 和 value 如何组织?单个 key 需要多少额外空间存储元信息?
- HashMap 的查询与插入:如何通过 key 计算出 value 的地址?冲突如何处理?
- 不同的 HashMap 不同点在于冲突如何处理,除了常规可读可写的 HashMap,存在只读 HashMap,存储更小,性能更优。
常规 HashMap
在各个语言都有内置的 HashMap 实现,除了使用不同的 Hash 函数,不同实现对 Hash 冲突的解决方案也不同:
- 拉链法:每一个桶都存着链表的 head 节点,冲突 key 将会被插入链表;
- 升级红黑树:Java8 在链表长度超过 8 时转换成红黑树;
- 线性探测法:发现冲突时向后找到第一个没有占用的桶存储,缓存命中率高,负载因子越高,插入效率越低;
- 多级 Hash 法:单次 Hash 结果冲突时,换一个 Hash 函数直到 Hash 值无冲突。
F14 & B16 系列 HashMap
[F14 & B16] 是一种利用 SIMD 技术进行查找的链式 HashMap,它为每一个 Key 计算两个 Hash 值:H1 和 H2,H1 决定 Key 放在哪一个桶里,H2 用来处理桶内冲突,一般要求负载因子比较高,以获得较高的空间利用率。同时对桶内的 H2 通过 SIMD 指令对比,一次对比 14 个 key 或者 16 个 key,相比 PerfectHashMap,它可以支持动态插入,但是查找性能不如 PerfectHashMap。
PerfectHashMap
有没有办法把 Prefect Hash 利用起来做 HashMap?由于 Perfect Hash 已经映射到 [0, table_size) 内的整数,完全不需要考虑 key 的冲突处理,所以想用起来比较简单:
- 当 hashmap 的 value 定长时,我们可以直接通过 Hash 值(Index)计算出 value 的 offset,无需使用任何额外空间。
- 当 hashmap 的 value 不定长时,引入一层 relocation,存储每一个 Hash 值对应 value 的 offset,由于 Hash 值是从 0 递增的,因此 offset 也是递增的,可以通过一定方法去压缩 value offset。
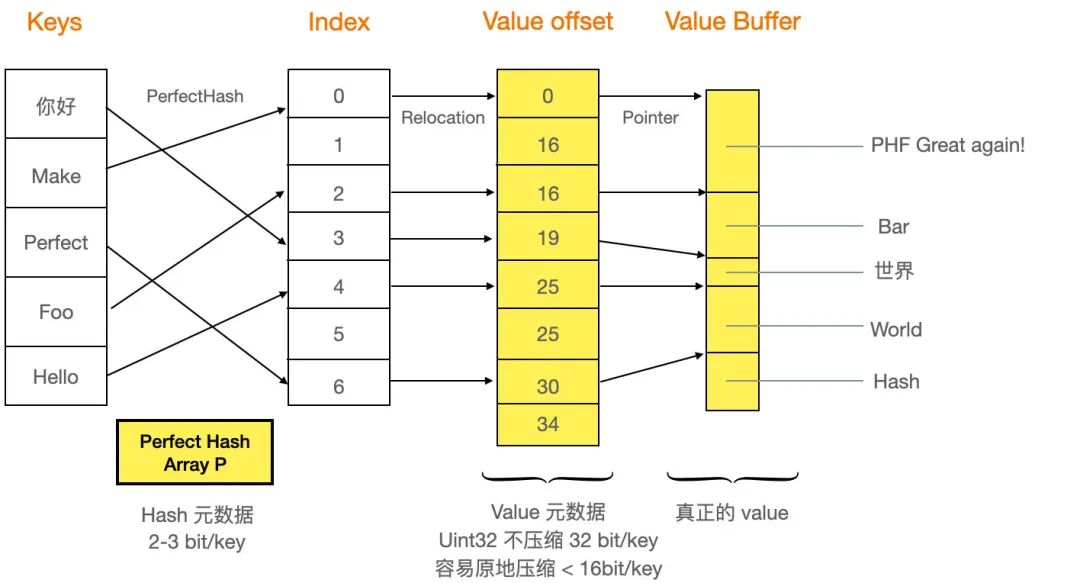
PerfectHashMap 一般用法是先离线生成 map 信息,再读到 buffer 里,或者像 rust-phf 一样编译时内置到二进制,直接读 P 数组,如果 HashMap 特别大,还可以通过 mmap 只读方式载入到内存中。
Benchmark
测试设备:MacBookPro m1 Pro 32G,MacOS 12.4,clang 13.1.6。
比较对象:
- unordered_map:标准库自带的 HashMap,链式实现;
- Folly F14:Facebook HashMap 实现,使用 SIMD 优化查询过程;
- abseil swiss table:Google HashMap 实现,为速度优化,包括使用额外指针的 node_hash_map,与原地存储适合小 value 的 flat_hash_map;
- PTHashMap:PTHash + Value offset 映射,(内部使用 CityHash128),c = 7, alpha = 0.98,Compact-Compact Encoding,Value offset 使用 MILC 压缩。不存储 key;
- PTHashMap3:与 PTHashMap 参数不同:c = 3, alpha=0.99;
- PTHashMap10:与 PTHashMap 参数不同:c = 10, alpha=0.94。
string
测试场景:输入 100w 随机不重复不定长字符串(平均长度 8 bytes)作为 key,value 与 key 相同。全部随机 lookup 一遍。
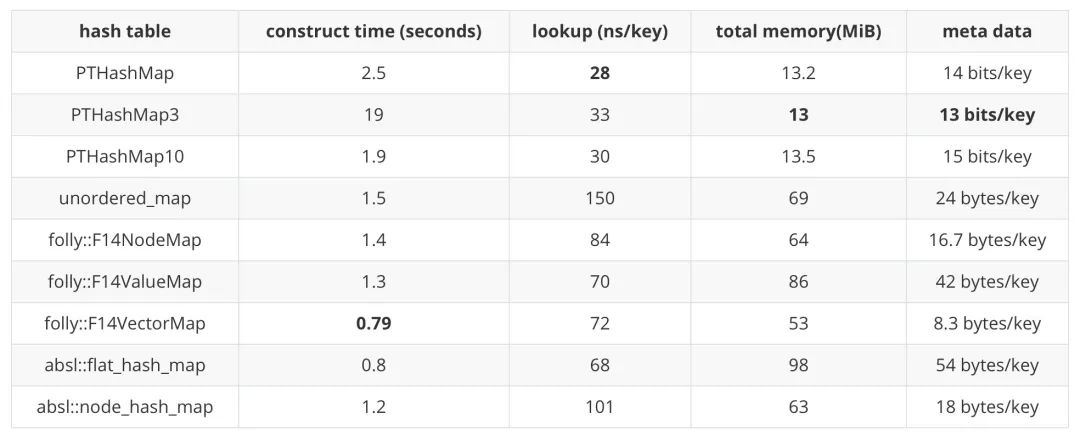
meta data 排除了 key 和 Value 之后统计占用内存大小,folly 使用 computeStats() 统计内存数据;total memory 值插入所有 key 后使用 gpertools 统计占用内存大小,包含 key 和 value 部分;注意 PTHashMap meta data 统计单位是 bit。
uint64
测试场景:输入 100w 随机不重复 uint64 数字作为 key,value 与 key 相同,全部随机 lookup 一遍。
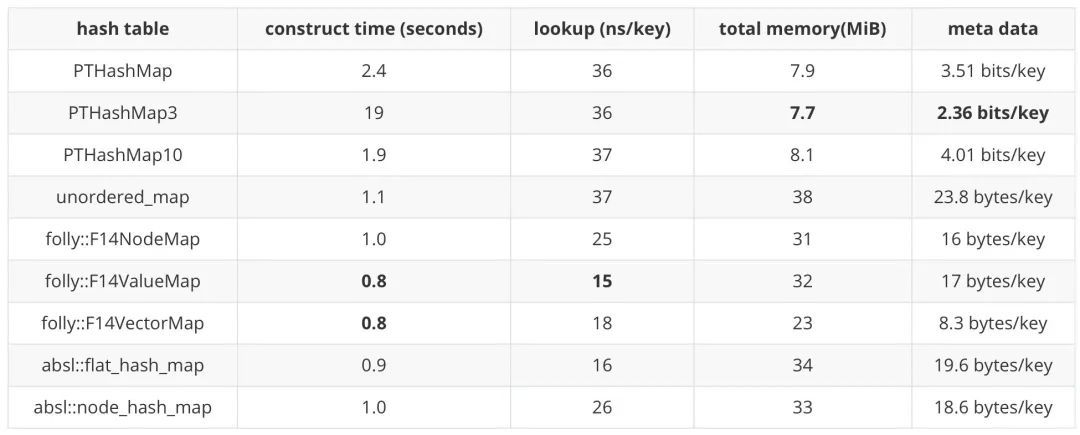
由于该场景数据是长度固定,PTHashMap 去掉了 Value offset 映射表。
结论
完美 Hash 的概念扩展了 Hash 的使用场景,最近出现的新型完美 Hash 算法在运行速度&构建速度上取得了较大的进步,针对海量只读场景使用完美 HashMap 不仅可以提升速度,同时能够节省大量内存占用。