存储系统中内存索引结构的选择
radix tree
随着最近几十年来服务器主存容量的增加,即使是大型的事务数据库也能把索引全部放到主存中,当索引数据都在内存中时,索引的性能也就越来越重要。
传统的数据库系统比如mysql一般用B+树作为自己的索引,B+树能够有效减少磁盘IO次数,支持范围查询,但在纯内存环境下,它的性能表现并不太好,特别是B+树是通过key的比较来找节点的,当比较结果产生分支预测失败时,会引起CPU stall。
哈希表是另外一个流行的内存数据结构,和查找树O(logn)的查找时间相比,哈希表只有O(1)的查找时间。尽管如此,哈希表有两个缺陷,一个是哈希表不能支持范围查询,二是哈希表的rehash非常慢可能会造成严重的性能抖动。如果说业务不需要支持范围查询又容量恒定的话,哈希表是最快的索引结构。
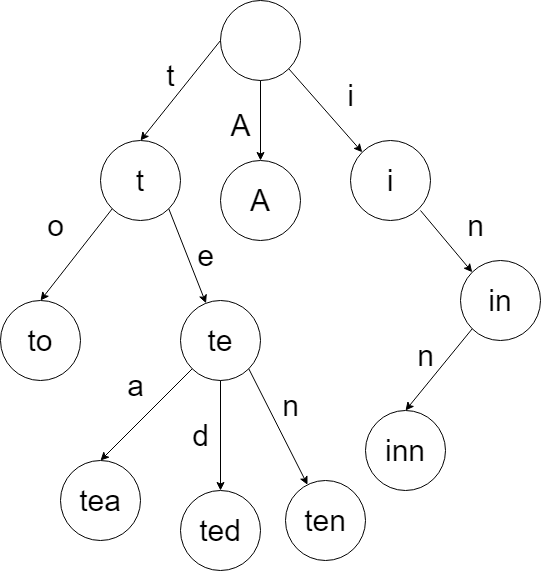
第三种数据结构被称为radix tree,或者前缀树,trie等。和二叉树不同,key不会直接保存在节点中,而是由节点在树中的位置决定。radix tree把一个完整的key转变成了字符的序列,每个节点都对应一个特定的字符,每个字符都有可能指向任意一个字符。在radix tree中查找一个key就像查字典一样。从根节点开始每个字符都可以找到一个对应的节点,依次查找key的所有字符就找到了key对应的叶子结点。
由于这种构建方式,radix tree有很多有吸引力的特性使它和基于比较的搜索树完全不同:
- radix tree的高度和搜索的复杂度和key的长度有关,和包含的元素数无关
- radix tree没有rebalance
- 中间节点不需要保存key,叶子结点的路径就是key
radix tree有两种类型的节点:内部节点,通过key的一部分指向其他节点;叶子节点,存储了key所对应的数据。内部节点一般用一个数组表示,在遍历过程中,key的一部分作为数组的索引,这样不用任何的比较就能找到下一个节点。部分key的比特数也就是参数span,对于radix tree的性能非常重要,当key的总长度和span确定后,树的高度也就确定了。
在数据库系统中,基于比较的搜索树是非常常见的索引结构,可以简单比较一下radix tree的高度和平衡二叉树的比较次数。平衡二叉树每次比较只能排除1/2的数据,而radix tree在span=8时,每次能排除255/256的数据,所以平衡二叉树的高度会更高。
我们可以通过一个简单的公式分析一下,假设key有k位,那么在radix tree里查找一个key需要k/s次,也就是树的高度。平衡二叉树在同样元素数据下的高度,假设元素个数是N,那么平衡二叉树的高度是
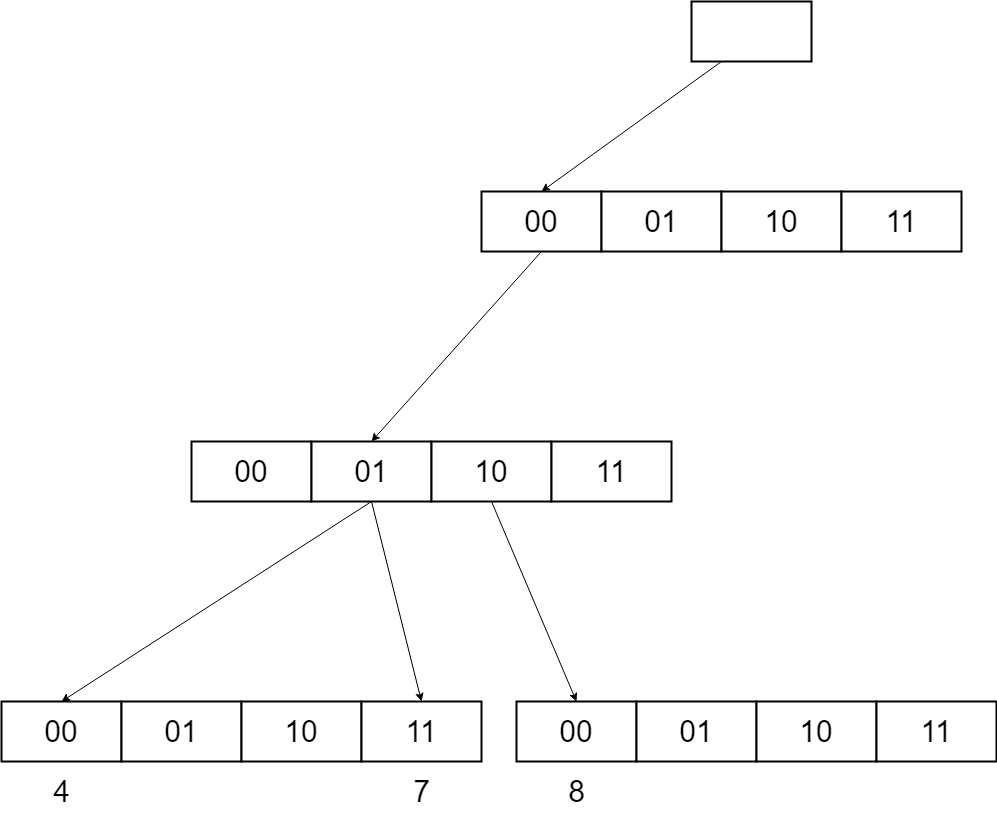
再考虑到key的比较时间的话,一个比较大的span通常会使radix tree比传统的搜索树快很多。但span也不是越大越好,大的span在key非常稀疏的场景下会引起空间的浪费。比如下面这个例子,key有6位,span是2位,最多可以存64个key,假设现在有3个key 4、7、8,二进制表示分别是000100、000111、001000,实际用的空间是16个指针128字节,平均每个key用了42字节;当有4、5、6、7、8、9、10、11, 8个key时,实际使用的内存还是128字节,但平均每个key用的内存降到了16字节。
为了解决这些问题,V Leis提出了一种自适应节点的radix tree,Adaptive Radix Tree简称ART。它在水平方向和垂直方向都做了压缩,以及用了SIMD指令来加速节点的查找。
优化1-节点压缩
定长的数组非常浪费内存,而频繁的resize非常影响性能,所以ART用了4种大小内部节点类型,Node4、Node16、Node48、Node256。理论上来说内部节点只要能通过key的一部分找到正确的子节点就可以。
1.Node4
Node4是最小的节点类型,可以保存最多4个子指针,key和子指针都被保存在长度为4的数组中。
struct Node4
{
Node header;
unsigned char child_keys[4];
Node* child_ptrs[4];
};
Node4* findChild(char c, Node4* node)
{
for (int i = 0; i < node->child_count; i++)
{
if (n->child_keys[i] == byte)
{
return &n->child_ptrs[i];
}
}
return NULL;
}2.Node16
Node16用来保存5到16个子指针,跟Node4一样,key和子指针保存在两个数组相同的位置,但是数组大小是16。在支持SSE2的CPU上可以用SIMD指令来做并行加速。
struct Node16
{
Node header;
unsigned char child_keys[16];
Node* child_ptrs[16];
unsigned char num_children;
};
Node* findChild(char byte, Node16* node)
{
__m128i results = _mm_cmpeq_epi8(_mm_set1_epi8(byte), _mm_loadu_si128((__m128i*)(&node->child_keys[0])));
int mask = (1 << node->num_children) - 1;
int bitfield = _mm_movemask_epi8(results) & mask;
if (bitfield == 0)
{
return NULL;
}
return &node->child_ptrs[__builtin_ctz(bitfield)];3.Node48
Node48用来保存17到48个子节点,Node48不会再直接保存key的内容,而是用key直接在长256的数组里查找孩子的下标,然后在长48的数组里找到子指针,Node48和Node256直接用span就可以直接找到对应的子节点。
struct Node48
{
Node header;
unsigned char child_ptr_indexs[256];
Node* child_ptrs[48];
};
Node* findChild(char byte, Node48* node)
{
Node48* n = reinterpret_cast<Node48*>(node);
int index = n->child_ptr_indexs[byte];
if (index == 0)
{
return NULL;
}
return &n->child_ptrs[index - 1];
}4.Node256
Node256是最大的节点,用来保存49到256个子指针。它把指针放在了长256的数组里,用key可以直接索引到指针。
struct Node256
{
Node header;
Node* child_ptrs[256];
};
Node* findChild(char byte, Node256* node)
{
Node256* n = reinterpret_cast<Node256*>(node);
return &n->child_ptrs[byte];
}用了这四种内部节点后,radix tree的状态就变成了下图,在key稀疏的场景下能有效的节省内存。

优化2-路径压缩
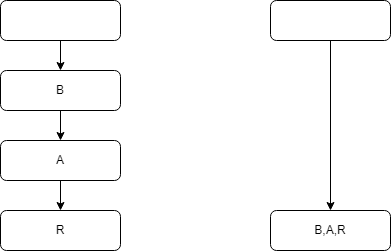
比如我们现在有一棵树BAR,BAZ,B只有一个子节点A,A有两个节点R,Z,那其实BA合并为一个节点就可以了,只需要增加一个vector保存BA的序列。

优化3-慢展开
慢展开的优化思路其实和上面的路径压缩是一样,只不过场景不一样,当最下面的子节点只有一个时,可以把路径上所有的序列都合并到叶子节点中。
性能
现在的服务器上内存越来越大,但CPU的cache仍然很小,所以对于索引来说节省内存对于提升性能来说尤其重要。对于radix tree来说,key在稀疏场景下有很大的内存浪费,而且会让cache miss更加严重。ART通过自适应节点和路径压缩优化了这些问题,使得不管在key非常稀疏还是密集的场景下,索引的性能都很优秀。作者在论文中推理了每个key占用的内存最多是52个字节,而在密集的场景下最好能做到8.1字节,而且在实际应用场景中,密集的key是更常见的。
作者也做了很多试验来对比ART和其他索引的性能,通过图表可以看出在不同的key数量下,ART的查询性能都比其他索引要好,只有哈希表和它在一个数量级。

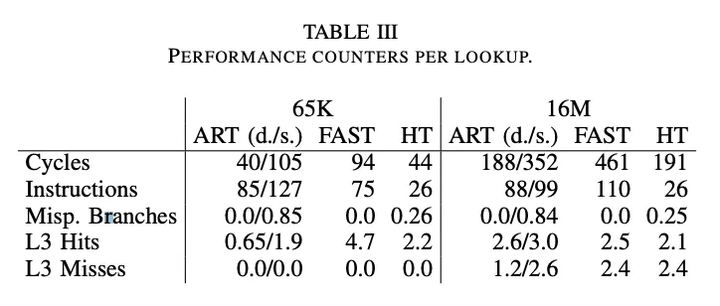
然后作者又分析了导致性能差异的原因,在1600万key的时候,哈希表,FAST和稀疏ART的cache miss是差不多的。而在密集场景下,ART的内存对于CPU cache更加友好,可以减少一半的cache miss,所以性能要比其他的索引好。在6万key的时候,查询性能主要受指令数和分支预测失败影响,密集场景下ART基本没有分支预测失败,稀疏场景下ART每次lookup有0.85次分支预测失败,而且在密集场景下Node256的查询需要的指令数更少,所以ART在密集场景下要比稀疏场景好不少。
本着严谨的原则,我们也实现了ART,并把它和红黑树,哈希表做了一些性能对比,红黑树用的就是std::map,哈希表用的std::unordered_map。测试用了一个自己实现的内存benchmark,key是uint64,value是一个8字节的指针,1000万key的规模,在顺序和随机模式下分别测试了红黑树,哈希表和ART的性能表现。
顺序插入1000万key顺序查找1000万key随机插入1000万key随机查找1000万keyART0.12us 29B0.08us0.42us 40B0.21ushash0.16us 48B0.04us0.71us 48B0.26usrb-tree0.31us 66B0.19us1.63us 66B0.96us从我们自己的测试结果发现密集场景和稀疏场景,每个key的内存占用差距似乎没有想象中大。最后发现原来是内存的字节序引起的,如果直接把key 1,2转换成字节序是[1,0,0,0,0,0,0,0] [2,0,0,0,0,0,0,0],如果按照这个字节序列插入的话,那前缀压缩几乎就没有效果了,如下图
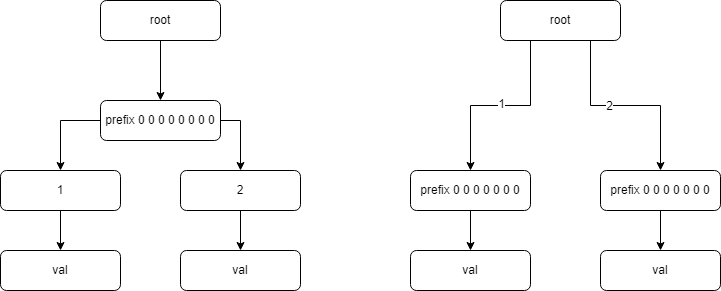
所以在树在初始化的时候要根据机器确定下字节序的问题。
通用的ART为了解决不定长的key的读取问题会在叶子结点存储整个key,比如key BAR是key BARR的前缀,但他们是两个key。但在我们的业务场景下,key是定长的,所以在叶子节点是不用保存key的,只要保证查询路径是固定字节数就可以了。经过这些优化,在密集场景下可以将每个key的内存占用优化到8B。
顺序插入1000万key顺序查找1000万key随机插入1000万key随机查找1000万keyART0.11us 8B0.05us0.53us 51B0.06ushash0.16us 48B0.04us0.71us 48B0.26usrb-tree0.31us 66B0.19us1.63us 66B0.96us总结
我们分析了存储系统通常用的一些内存索引,介绍了最近比较流行的radix tree的变种ART,它有着radix tree的优点,并且很大程度上优化了radix tree的缺点。
通过作者的性能分析可以看出在现代的服务器上,cache miss和分支预测失败等因素对于索引的性能影响非常大,ART在这些方面做了很多优化,并且利用了一些SIMD的指令来加速查询。我们自己的测试也发现ART在不通场景下都优于其他类型的索引,只有哈希表跟它性能差不多,但哈希表只能支持点查询。
我们的业务系统在单机存储引擎上用的就是哈希表,但当系统架构从原地写模式转变为追加写以后,碎片化就非常严重,每个用户连续的1M块可能每个4k都是不通的物理存储位置,所以哈希表就不再适用于这个场景了。ART最大的好处就是它的数据都是顺序存储的,所以在范围查询上相比哈希表优势就非常大了。当然最后,最合适的才是最好的,还是要根据业务场景来选择最合适的索引。